Graph Definition
The Graph
The graph is the central element in Roboconf’s configuration files.
It defines Software components and their relations. At runtime, it will be used to determine
what can be instantiated, and how it can be deployed.
The graph defines relations between components.
A component by itself is just a definition (like a Java class). At runtime, we do not manipulate components but instances of a component.
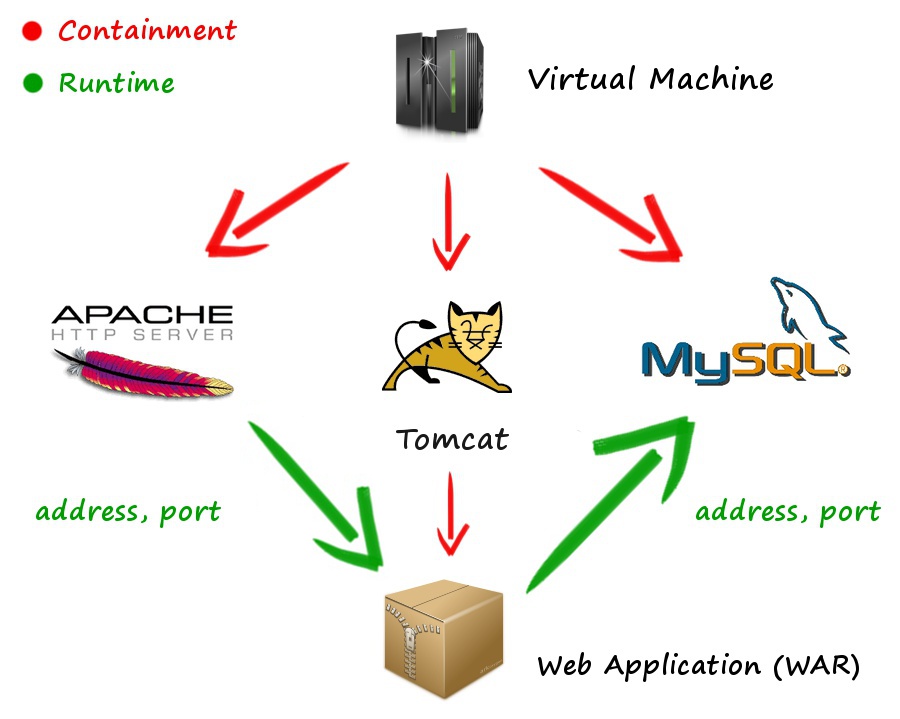
Software components include the deployment roots (virtual machines, devices, remote hosts), databases, application servers and application modules (WAR, ZIP, etc). They list what you want to deploy (or possibly deploy). Two kinds of relations are modeled:
-
Containment means a component can be deployed over another one.
As an example, a Tomcat server can be deployed over a virtual machine. Or a web application (WAR) can be deployed over a Tomcat server. -
Runtime relations references components that work together.
As an example, a web application needs a database. More specifically, it needs the IP address and the port of the database. Generally, this information is hard-coded. Roboconf can instead resolve them at runtime and update the configuration files. As an example, MySQL, Tomcat and MySQL can be deployed in parallel. Tomcat will be deployed but will not be able to start until it knows where is the database. Once the database is deployed and started, Roboconf will update Tomcat configuration so that it knows where is MySQL. This is what runtime dependencies make possible.
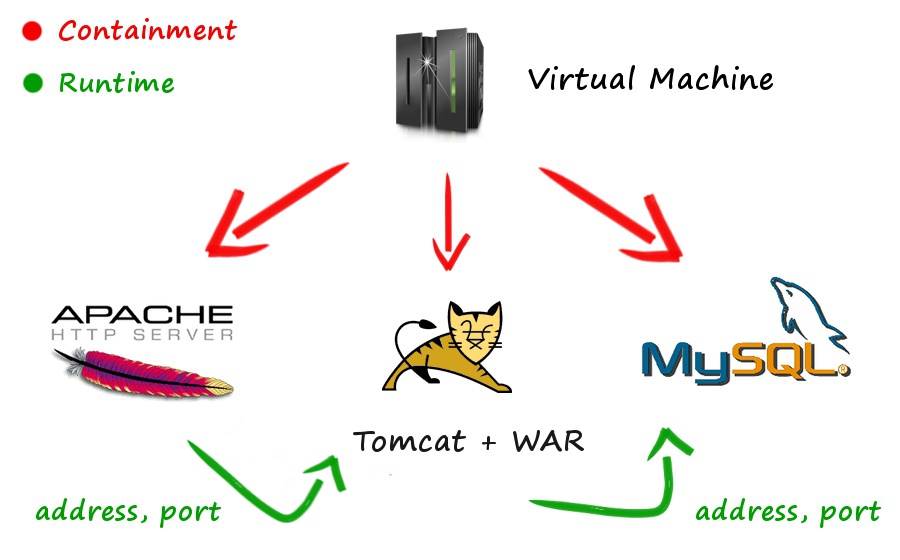
What is modeled in the graph is really a user choice.
Various granularity can be described. It can goes very deeply in the description…
… or bundle things together (associate a given WAR with an application server).
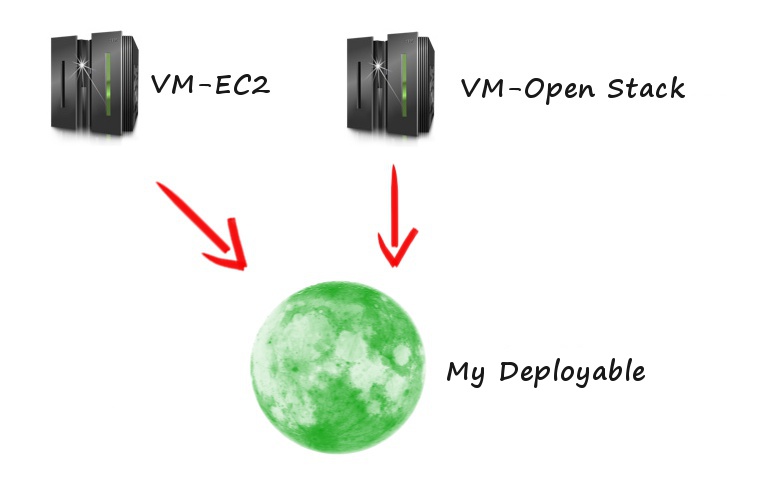
Multi-IaaS is supported by defining several root components.
Each one will be associated with various properties (IaaS provider, VM type, etc).
The following graph means my deployable can be deployed either on EC2 virtual machine or on
an Openstack VM.
Until now, we have talked of a graph.
However, if you look at Roboconf’s source code, we manipulate *graphs. In fact, you can define a
single graph, or a collection of graphs. The interest of having several graphs is to define virtual appliances.
As an example, you could define the following graphs inside a same project:
- VM_Tomcat / Tomcat / Web Application “A”
- VM_MySQL / MySQL
- VM_Apache_Load_Balancer / Apache
Or you could define a single graph, with a single root VM and three possible children (Tomcat, MySQL and Apache Load Balancer).
The IaaS on which the VM is will be created is defined in the component’s resources directory. We will see this later.
Graph Configuration
This page is an introduction.
Please, refer to the full DSL syntax for more details.
A Roboconf project must contain an graph directory with the definition of a graph.
As a reminder, like a Java class, a Roboconf component is only a definition.
It needs to be instantiated to be used.
By convention, graph definitions are expected in files with the graph extension. The parser will not be difficult if you use another extension. However, notice that tools may rely on the extension (such as editors, to provide syntax highlighting).
A component starts with the component name, followed by an opening curly bracket.
Components can be defined in any order.
# This is a comment
# There are only in-line comments
# The VM
VM {
installer: iaas;
children: MySQL, Tomcat, Apache;
}
# MySQL database
MySQL {
installer: puppet;
exports: ip, port = 3306;
}
# Tomcat
Tomcat {
installer: puppet;
exports: ip, portAJP = 8009;
imports: MySQL.ip, MySQL.port;
}
# Apache Load Balancer
Apache {
installer: puppet;
imports: Tomcat.portAJP, Tomcat.ip;
}
Every component property must be defined on a single line.
However, for readability purpose, it is possible to repeat some properties, such as exports and imports.
Tomcat {
installer: puppet;
# Exports
exports: ip;
exports: portAJP = 8009;
# Imports
imports: MySQL.ip;
imports: MySQL.port;
}
Graph Files
Components can be defined in separate files and in any order. This is achieved thanks to the import keyword.
Graphs definitions can mix imports and components declaration, or, it can only contain imports.
import graph-part-1.graph;
import graph-part-2.graph;
MyComponent{
# whatever
}
File imports are not relative to the current’s file location.
They are resolved from the graph directory.
As an example, import dir1/dir2/servers.graph; means we import the file servers.graph located under
graph/dir1/dir2 directory of the project.
Properties Overview
Let’s see the properties you can or have to set for a component.
-
installer is mandatory and designates the Roboconf plug-in that will handle the life cycle of component instances.
Examples of Roboconf plug-ins include Bash and Puppet implementations. -
children lists the component that can be instantiated and deployed over this component.
In the example above, it means we can deploy MySQL, Tomcat and Apache over a VM instance. -
exports lists the variables this component makes visible to other components.
Variable names are separated by commas. ip is a special variable name whose value will be set dynamically by Roboconf. All the other variables should specify a default value. -
imports lists the variables this components needs to be resolved before starting.
Variable names are separated by commas. They are also prefixed by the component that exports them. As an example, if Tomcat exports the ip variable, then a depending component will import Tomcat.ip. -
extends indicates this component extends another component.
A component that extends another one inherits its exports, its imports, its installer and its recipes. An extending component can override the value of an inherited element. It can also add new variables (for export or for import). It cannot remove inherited elements.
Exported Variables
Exported variables are defined through the exports keyword.
ALL the exported variables are prefixed, either with a component or a facet name.
Tomcat {
installer: puppet;
# Exports Tomcat.ip and Tomcat.portAJP
exports: ip;
exports: portAJP = 8009;
}
It is also possible to wrap variable values with quotes.
Tomcat {
installer: puppet;
exports: ip;
exports: portAJP = "8009", welcome_message = "This is my welcome message, say hi!";
}
ALL the exported variables must have a default value.
These values can be overridden by instances. Empty values are possible but must be surrounded with quotes.
exports: message = "";
ALL the exported variables must have a default value.
Only two kinds of exceptions exist:
-
ip is a special variable name.
Its value is set dynamically by a Roboconf agent. -
Random variables are another exception.
These variables have their value generated randomly by Roboconf. For the moment, only random ports can be generated. These ports are chosen among 10000 and 65500, excluding 35197 which is used by RabbitMQ.
Random values are generated by the DM when a new application is created or when its model changes (new or deleted instance). Once a random port has been set, it will not change anymore. Ports are unique per agent, which means a random port chosen for an agent’s instance will not be pick-able for any other instance managed by the same agent.
Random ports are declared with the following notation.
Tomcat {
installer: puppet;
exports: ip;
exports: random[port] httpPort;
exports: random[port] ajpPort;
exports: path = mandatory-value;
}
It is not possible to define a value for a random variable.
At least, not in the graph. But it is possible to set one in the instances model.
It is also possible to inject Roboconf values in the exported variables.
Tomcat {
installer: script;
# Export the name of the Roboconf instance (e.g. tomcat).
exports: inst = $(ROBOCONF_INSTANCE_NAME);
# Export the instance path (e.g. /vm/tomcat).
# This is a unique identifier in the application.
exports: path = $(ROBOCONF_INSTANCE_PATH);
# Export the instance path with special characters being escaped (e.g. vm_tomcat).
# It is not mandatory unique, but most likely.
exports: clean_path = $(ROBOCONF_CLEAN_INSTANCE_PATH);
# Export the cleaned instance path but in reversed order (e.g. tomcat_vm).
# It is not mandatory unique, but most likely.
exports: rev = $(ROBOCONF_CLEAN_REVERSED_INSTANCE_PATH);
# Export the component name
exports: comp = $(ROBOCONF_COMPONENT_NAME)
# And obviously, we can mix...
exports: sentence = "$(ROBOCONF_INSTANCE_PATH) is an instance of $(ROBOCONF_COMPONENT_NAME)."
}
Imported Variables
Imported variables are defined through the imports keyword.
A component instance will not be able to start until all its runtime dependencies are resolved.
It means all the variable it imports must be exported by another instance. If one variable has no value, then it cannot start.
When nothing is indicated, it means the import is mandatory.
But an import can also be marked as optional.
In this case, the instance will be able to start even if the imported variables are not resolved.
As an example, if you think to a cluster mode, a cluster member may need to know where are the other members.
ClusterMember {
exports: varA, varB;
imports: ClusterMember.varA (optional), ClusterMember.varB (optional);
}
It is possible to group imports thanks to the wildcard symbol.
As an example, the previous imports could simply be written as…
imports: ClusterMember.* (optional);
Besides, by default, imported variables refer to variables that are exported inside a same application.
When dealing with several Roboconf applications, it is possible to specify a variable is exported by another Roboconf
application. This is achieved with the external keyword. This use case can be seen as a solution to manage an information system view.
imports: external ClusterMember.*;
You can find more information about this external variables on this page.
Facets
Components designate Software components.
They could be seen also as types. And sometimes, we need abstractions to manipulate types.
Such abstractions can be used to group common properties or just to provide late-binding.
Facets are abstract components.
A component may inherit from one or several facets.
Components and facets are both defined *.graph files.
A facet can define exports and children.
That’s all. The installer name and the imports are all tightly coupled to recipes. And by definition, a facet
cannot have recipes. Facets are useful to group common properties, as well as a suitable way for reusability.
Let’s take a first example.
# The VM facet
facet VM {
children: deployable;
}
# The deployable facet
facet deployable {
# nothing
}
Let’s take another example.
# An abstract type
facet load-balance-able {
exports: ip, port = 8080;
}
# A load balancer component
load-balancer {
installer: puppet;
facets: deployable;
exports: ip;
imports: load-balance-able.*;
}
Thanks to facets, we can define independent definitions and reuse them when needed to create new links between Software components. Here, we could define another component with the load-balance-able facet, and Roboconf would know that it would be linked with our load balancer.
If we had to do some comparison, we could say components are like Java classes, and that facets are like Java interfaces.
Components are implementations. And facets are abstractions.
System Requirements
The graph model allows define multi-container and distributed topologies.
We can go from the machine (VM, device…) to an application module (e.g. a Web Application). However, and even if
the model could support it, it is not considered as a good practice to define system requirements as graph nodes.
What does it mean?
Let’s take an example.
If an application server needs a JVM or a library to run (such as Python), you should not rely on Roboconf to install it. It is not that you could not achieve it with a Bash script or something else. But it may be better to pre-install and configure such dependencies directly in the virtual images. As an example, there are mechanisms in Java Virtual Machines such as endorsed and policies that would be painful to configure with Roboconf. And, again, the problem here is not Roboconf, but the way you would implement it with a Roboconf plug-in (Bash, Puppet…).
This has been experimented with NodeJS application.
Write a Bash script that respect Roboconf’s requirements (be idem-potent) that installs NodeJS and NPM was quite painful to do.
Pre-installing them on virtual images was much more convenient.
System requirements should not be deployed with Roboconf.
They should be deployed and configured in the virtual images.