
Introduction to Roboconf
Project

- Launched in 2013
- Open source (Apache v2)
- Hosted on GitHub
Roboconf is based on a prototype developed by Université Joseph Fourier (Grenoble, France). It is now being industrialized by Linagora, a French Software company.
In Few Words
Roboconf is a solution based on asynchronous exchanges to deploy and reconfigure distributed applications.
It translates concepts from component models (like OSGi) to Software deployment and management.
Target Users
Roboconf is intended for project teams with requirements about dynamic deployments and where scalability matters.
The ideal user profile is a DevOp.
Someone
involved in the project development but with a focus on production
issues.
Roboconf Features - 1/2
Deployment
Installs and configures Software applications.
Deployment Targets
Allows deployment over various targets: cloud infrastructures (IaaS), devices, on-premise hosts... Hybrid deployments are supported.
Roboconf Features - 2/2
Reconfiguration
Application parts notify each others, which allow them to reconfigure themselves through scripts. Roboconf handles applications life cycle.
Monitoring
Monitoring support is in progress.
Covered Use Cases
- Cloud deployment
- Hybrid deployments
- Highly dynamic environments
(with lots of reconfiguration)
Roboconf can deploy any kind of Software.
It suits well for
distributed applications. There is no constraint on languages or
frameworks. If you can script it, you can make it automatic with
Roboconf.
Large-scale deployments are not well covered (yet).
Roboconf...
... does not reinvent the wheel.
Thanks to a plug-in approach, it is possible to use Bash scripts and Puppet modules. You could also use other solutions like Chef or CFengine, provided you write a plug-in for this.
Life cycle steps can thus be handled through robust solutions.
Roboconf only plugs dynamics behind them.
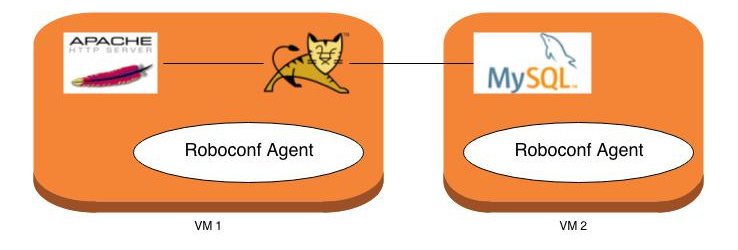
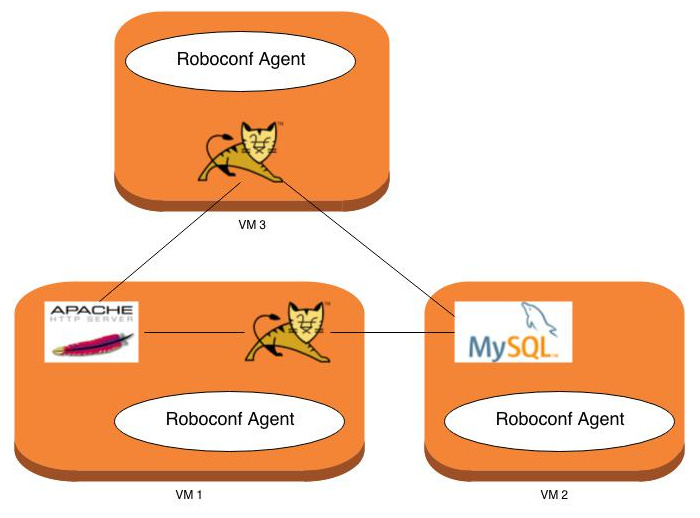
Architecture
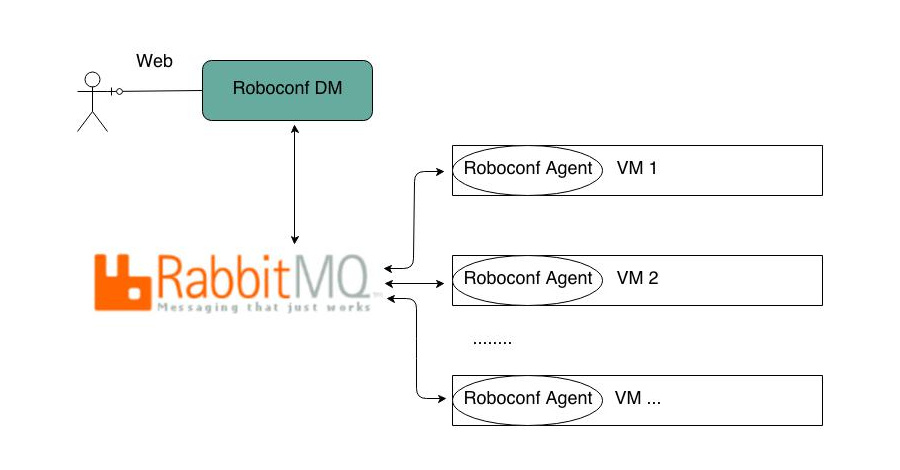
Roboconf relies on 3 elements: the DM, agents and a messaging server (RabbitMQ). VM designate Virtual Machines or any kind of machine (server, device...).
The DM
The Deployment Manager (DM) is the application in charge of driving deployments. It is the interface through which one can pass requests (deploy this, start that...).
It provides a set of REST services.
It is generally packaged with a web application (roboconf-web-administration)
that acts as a user-friendly front-end for the REST API.
- ... interact with a IaaS manager to create or destroy VM.
- ... communicate with Roboconf agents through a messaging server.
The Agents
Every machine on which Roboconf must deploy or manage something must have an agent installed. This agent is in charge of listening...
- ... instructions from the DM.
- ... notifications from other agents.
Depending on what it receives, an agent will execute recipes.
Recipes are associated with plug-ins (Puppet, Bash...). This results in a change,
either in the life cycle or in the configuration files of an application.
There is one agent per machine.
But it can install and manage several elements on it. Installed applications are not
aware of Roboconf (=> middleware).
The Messaging Server
The messaging server is the medium used to exchange information between...
- ... the DM and agents.
- ... an agent and other agents.
The current messaging server is RabbitMQ.
It is a robust, open source, message broker that implements AMQP and that supports clustering.
Tips about the DM
The DM can be deployed anywhere.
The good practice is generally to run it locally (in the information system)
rather than putting it on a public server. This way, it skips a lot of work to
secure it.
The DM was designed to be started when it is required.
It means you can stop it when you do not use it. Its state is persisted in consequence on a file system.
It also makes procedures quite simple to restore it after a crash.
Tips about RabbitMQ
The messaging server is the key point so that everything works.
It must be reachable from the DM and all the agents. A public location is thus required.
Roboconf uses authentication mechanisms provided by RabbitMQ to secure access to the messaging server.
Tips about Agents
The most convenient use case with Roboconf is when VM are created in a cloud infrastructure (IaaS). The DM creates them from the IaaS image catalog. So, to have an agent installed and configured on every machine, a virtual appliance has to be created and stored in the image catalog.
For other kind of hosts, one has to use other solutions to install and configure agents. Solutions like Puppet, or scripts that do SSH are suitable.
Most of the information an agent needs is supplied by the DM at runtime.
This keep their configuration minimal.
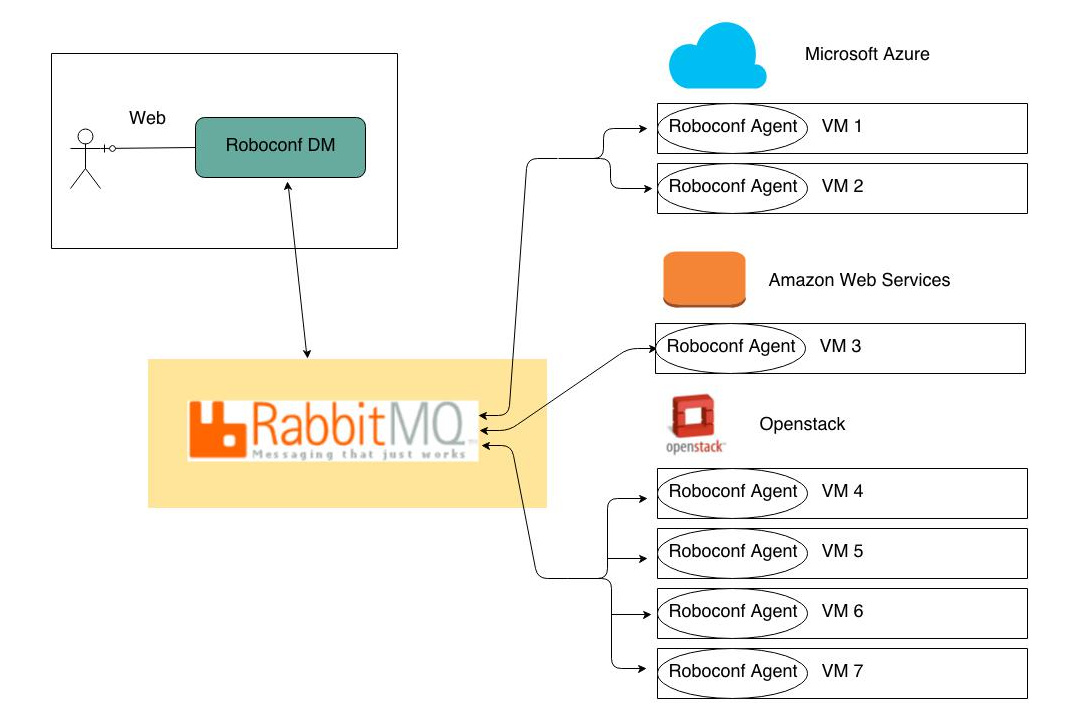
Multi-IaaS
Multi-target and hybrid deployments are supported.
This can be used for critical periods (load increase) or for migration purpose.
It can also serve strategic objectives (like data security and privacy issues).
The next slide illustrates this with some cloud infrastructures.
It only shows interaction between Roboconf parts, and not between the parts of
the applications that Roboconf deploys.
Concepts
The Graph
The graph defines Software elements and their relations.
Software elements include virtual machines, application servers, application packages... whatever.
They are called components.
Two kinds of relations are considered.
Containment
A component has to be deployed onto another one.
Example: a war onto a web application server.
Runtime
A component needs another one to run.
A component provides a feature another component may need.
Example: a war application needs a MySQL database.
Containment Example
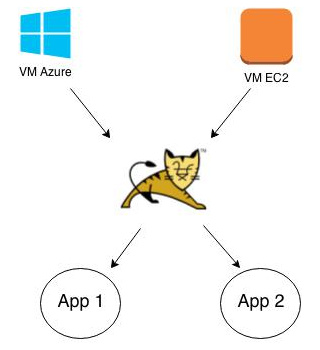
We can deploy Tomcat either on an Amazon VM, or on an Azure VM.
And we can deploy given applications only on Tomcat.
If we wanted to deploy a third web application, we would have to update the graph.
Containment can be recursive. Tomcat is here both contained and a container.
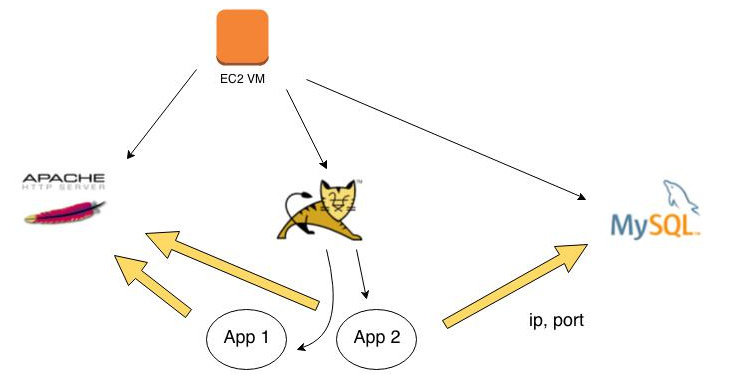
Runtime Example
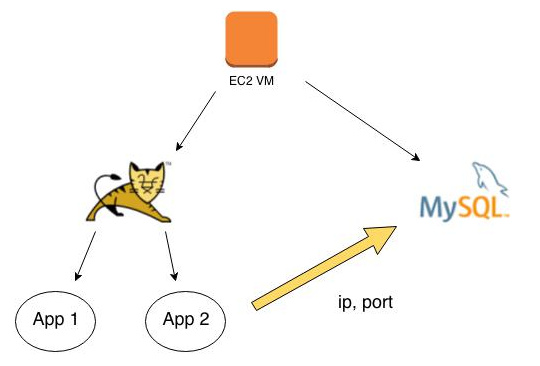
Here shows a mix of containment relations with a runtime dependency.
In this graph, App 2 depends on a MySQL database, which is not the case of App 1.
It means Roboconf cannot start App 2 until it has the ip and port
of a MySQL database.
Benefits of the Graph
For a given Software component...
- We know what can be deployed on it.
- We know on what it can be deployed.
- We know which other components it depends on.
Practical Use
When we want to deploy a new Software component...
- ... we can deploy it on an existing container.
- ... we can create its container at the same time.
The Graph(s)
The graph is a structure with two levels of reading (containment and runtime relations). It is a set of rules that will drive deployments and reconfiguration.
But unlike what the previous slides let think, there is not only one graph. Indeed, several graphs can be defined in the configuration files.
Thus, it is possible to define pseudo-appliances.
It means deployments can be made very flexible or very constrained.
This is useful because those that develop an application or plan its deployment are not those who effectively deploy and manage it in production. Constraining deployment of scalable parts reduces the risk of errors by the production team.
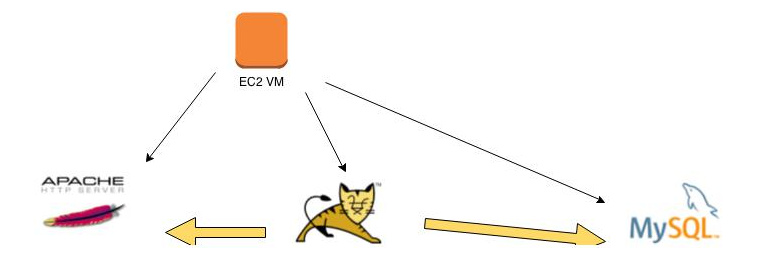
Lax Graph
We here consider the 3 main applications (Apache load balancer, Tomcat and MySQL) can be deployed over a same VM, or at least, on VM of the same « type ».
Appliance-like Graphs
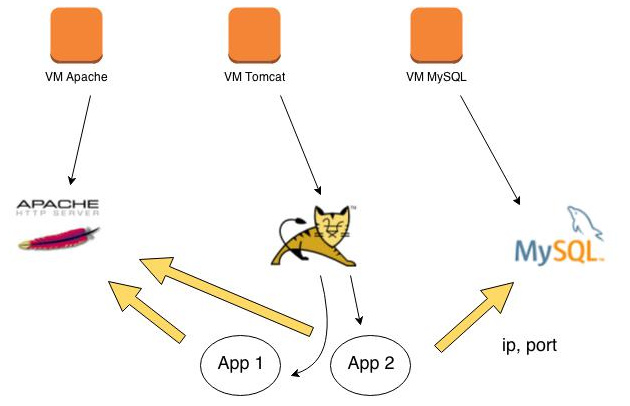
Here, we consider each of the 3 main applications must be deployed on their own VM type. It means we cannot deploy different applications on a given VM.
Every VM type can have its own template and configuration (tailored CPU, RAM, storage, operating system, network configuration...).
Recipes
Every component in the graph is associated with a set of recipes.
More exactly, every component in the graph is associated with a plug-in (« installer »).
A component associated with the Puppet installer will use a Puppet module as its recipe. A component associated with the Bash installer will use a set of Bash scripts.
Recipes define the actions to undertake when an administration decision was sent. It matches life cycle steps: deploy, start, stop and undeploy.
There is also a step called update.
It is invoked automatically by Roboconf on reconfiguration. This is discussed farther.
Instances
Instances means « instances of components from the graph ».
The graph is a set of rules. It could be seen as a meta-model for instances.
So, instances comply with what was defined in the graph.
Another comparison could be classes and instances from Object-Oriented Programming.
Instances inherit properties from their component.
They can override them, and even define new ones (local scope).
Their relations with other instances are ruled by the graph(s).
An instance is associated with a single component.
Application Meta-data
A Roboconf project is called an application.
It comes with the definition of graphs and predefined instances.
But it also has some information about the application itself.
Name, description, qualifier (version)...
Example: LAMP
The LAMP Example
This is the classical example to introduce Roboconf.
It consists in deploying a standard stack made up of...
- ... a load balancer (here, an Apache server with modJK)...
- ... an application server (Tomcat)...
- ... and a database (MySQL).
It illustrates both deployment and reconfiguration.
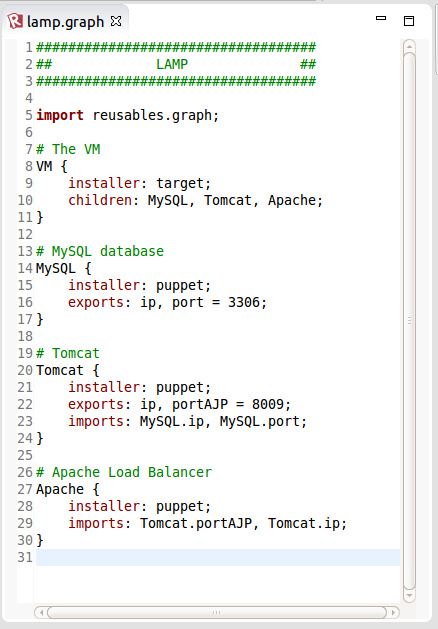
We use a very simple graph where web applications are installed with Tomcat (they are not in the graph, but part of the recipes).
We also assume the deployment is performed on Amazon Web Services.
The Graph
The Apache load balancer, Tomcat and MySQL can be deployed over a VM.
Tomcat needs a MySQL database. And the load balancer must be notified every time we deploy
an instance of of Tomcat.
Tomcat is not the stand-alone server.
The recipe behind deploys both the server and at least a web application in it. This is to keep things simple
for the example.
Instances Definition
We have our graph.
Let's assume we have the following set of instances in our model.
-
VM 1 (type: EC2 VM)
- Apache (type: Apache)
- Tomcat 1 (type: Tomcat)
-
VM 2 (type: EC2 VM)
- MySQL (type: MySQL)
This is just a model, something we define in our configuration files.
Let's see what happens when we deploy all.
VM Creation
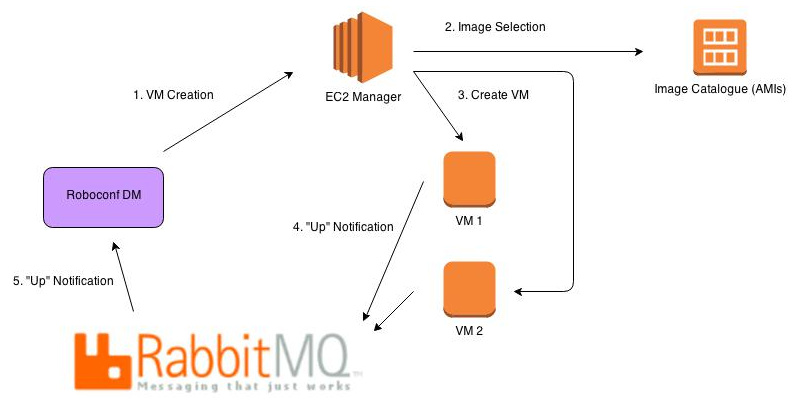
The DM sends one creation request per VM.
The request contains the ID of the image template to instantiate, as well as the expected flavour (CPU, RAM...) for the VM.
The virtual image contains an OS and a Roboconf agent with its configuration (RabbitMQ's IP...). Once the VM is up, the agent notifies the DM it is running.
DM and Agent Interactions
Here is what happens when an agent is « up ».
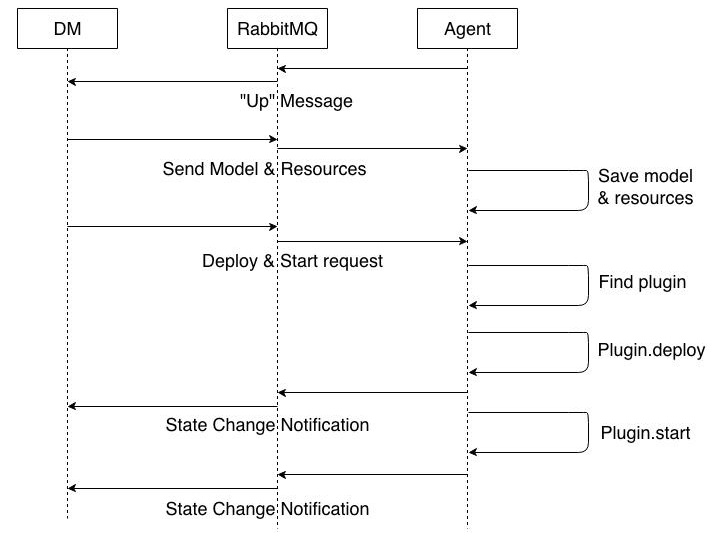
The special case of « Start »
An agent manipulates instances (associated to components).
An agent uses plug-ins to update the life cycle of an instance.
But « plugin.start » does not start an instance.
It tries to start it. Before executing it, Roboconf checks
all the runtime dependencies. If they are all satisfied, the plug-in can start.
Otherwise, the instance will remain in starting until its dependencies are all resolved.
Before Synchronization
Let's get back to our example. So far, the VM have been created. Apache, Tomcat and MySQL have been deployed. But Tomcat does not know where MySQL runs. And Apache does not know where web applications are deployed.
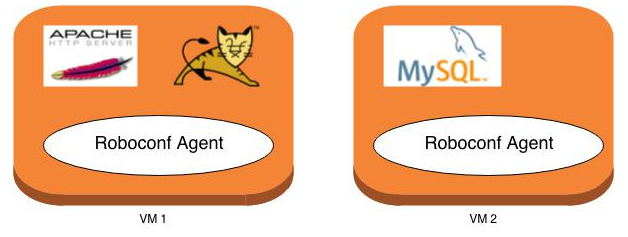
In fact, while deployments progressively complete here and there, agents exchange information between them through RabbitMQ.
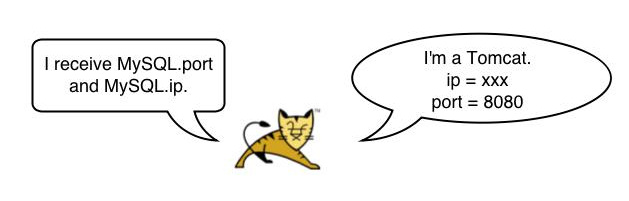
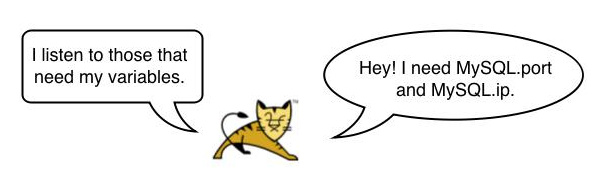
Variable Exchange - 1/6
Let's assume that Tomcat is the first deployed.
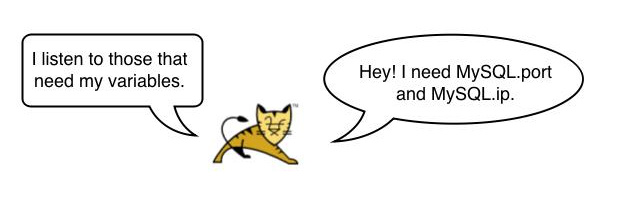
First, the local agent starts listening those that need Tomcat variables.
Then, it requests the variables it needs (MySQL). It will not be able to start until
it has these variables. Since it is alone, nobody will answer its request.
Variable Exchange - 2/6
Let's assume Apache is deployed right after.
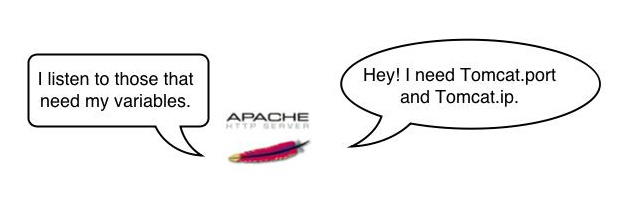
First, the local agent starts listening those that need Apache variables.
Then, it requests the variables it needs (Tomcat). It will not be able to start until
it has these variables.
Variable Exchange - 3/6
The agent in charge of Tomcat receives the request sent by the Apache agent.

But it is not started, it is missing variables.
So, it cannot publish its variables.
Variable Exchange - 4/6
Now, MySQL is up.
The graph states that the MySQL component / type does not have any dependency.
So, it can directly start.

When it starts, it listens to those that could need it. And it publishes its variables.
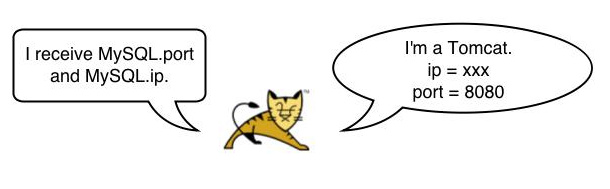
Variable Exchange - 5/6
Tomcat (its agent) gets notified about MySQL.
All its dependencies are resolved and it can start.
So, it can publish its variables.
Variable Exchange - 6/6
Eventually, Apache is notified about the Tomcat variables.
It can now start.

Since it does not export any variable, it publishes nothing.
Parallel Deployments
Roboconf parallelizes everything it can.
Here, two flows were executed in parallel.
- Create VM 1, deploy Apache and Tomcat.
- Create VM 2 and deploy MySQL.
While things were progressing, information was exchanged between agents, so that every instance could resolve its dependencies to start.
No matter in which order deployments are performed, Roboconf guarantees everything will get synchronized and running at the end. This is achieved through asynchronous exchanges.
Resulting Deployment
Here is what we get at the end.
Let's now try to add a new Tomcat server.
In our model, we define a new set of instances that we will deploy and start.
-
VM 3 (type: EC2 VM)
- Tomcat 2 (type: Tomcat)
Reconfiguration - 1/4
Once the new VM is created, the agent gets its model and deploys Tomcat.
Before starting it, it needs its dependencies.
Reconfiguration - 2/4

An instance of MySQL is already up and running.
It receives the request from the new Tomcat and publishes its variables.
Reconfiguration - 3/4
The new Tomcat gets the MySQL variables.
It can thus start and publish its own variables.
Reconfiguration - 4/4

An Apache load balancer is also up and running.
It is notified a new Tomcat is here. The associated agent executes the update recipe,
which adds the new Tomcat in the load balancer configuration.
Using one or all the Tomcat instances is specified in the recipes.
For a load balancer, we need to know ALL the instances. For a relational database, we
need to ONE instance (others are ignored).
Resulting Deployment
The Apache load balancer can now dispatch requests to 2 Tomcat servers.
Both rely on the same database.
Conclusion
Roboconf can deploy a distributed application in any order.
Parallelism is pushed to the limits. The asynchronous exchanges between agents guarantee that no matter what, the application will land on its feet.

This mecanism is used at deployment time as well as during reconfiguration phasis (addition or removal of application parts).
LAMP is the basic example
If one has to deploy a real LAMP stack, Roboconf fits.
However, a solution like Juju (from Ubuntu) does it too, and probably in a more affordable way.
But for complex applications or architectures, Roboconf brings a real value to teams. From this point of view, the LAMP example helps to understand the way it works.
Industrial Use Case
OpenPaaS
OpenPaaS is an open source PaaS (Platform as a Service) that aims at improving collaboration within and between organizations. It joins the ESN trend (Enterprise Social Network).
It covers the creation of communities around professional topics or projects, live messaging, email, agendas, document sharing and so on. All of this is structured around the notion of professional communities.
Technical Constraints
The platform relies on Web technologies.
The back-end is implemented with Node.js. The front-end is implemented with AngularJS
and related projects.
The platform must be cloud-ready.
It must adapt to intense-load periods.
And it must scale for more and more users. This led to use no-SQL databases.
Various other programs are or will be required in addition.
So, OpenPaaS is a complex distributed platform that must run in the cloud.
Overview
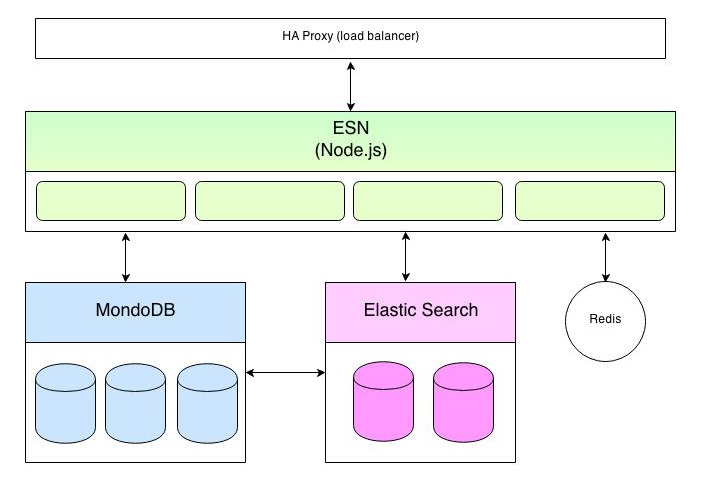
For the moment, OpenPaaS focuses on the web stack.
Scalable parts include the ESN application (Node.js), MongoDB and ElasticSearch.
Planned Upgrade
OpenPaaS should soon integrate other Software.
- Apache James, a Java-server for e-mailing.
- Cassandra, another no-SQL database.
- OpenLDAP and LinID.
Cassandra is used to store e-mails in a distributed database.
LDAP is used for authentication and permissions management.
This will add new scalable parts in the platform.
Hopefully, Roboconf will help to make its management as simple as possible.
Configuration Files
Project Structure
-
descriptor/
- application.properties
-
graph/
- *.graph
- 1 directory per component (for its recipes)
-
instances/
- *.instances
The graph is defined in *.graph files.
The description can be split in several files, for modularity.
The same thing applies to *.instances files.
This structure can also be ported into a Maven structure, for a combined use with the Roboconf Maven plugin.
Graph Files - 1/5
These files use a custom syntax, inspired from CSS.
They are readable and editable easily through any text editor.
They are less verbose than XML, and less error-prone than YAML.
# A component called 'MyComponentName'
MyComponentName {
installer: bash;
}
Comments and properties must fit on a single line.
installer is the extension Roboconf will use to deploy,
start, stop and undeploy instances of this component.
Every component has an associated directory that contains recipes or resources. These resources are used by the Roboconf extension identified by the installer name.
Graph Files - 2/5
An important aspect of components are imports and exports.
They are variables that a component exposes or requires.
# WebApplication exports "WebApplication.ip".
WebApplication {
exports: ip;
imports: MySQL.ip, MySQL.port;
}
# MySQL exports "MySQL.ip" and "MySQL.port".
MySQL {
exports: ip, port = 3306;
}
If a component imports a variable, then another component in the graph must export it. A component instance cannot start unless all its imports are resolved.
Every time a component instance appears or leaves, it notifies those that import its variables. The notified instances can then take proper actions through their recipes.
Graph Files - 3/5
It is possible to define optional imports.
Optional imports mean a component can start, even if these imports are not resolved.
But it will be notified if they appear.
# A cluster node.
ClusterNode {
exports: ip, port = 18741;
imports: ClusterNode.ip (optional), ClusterNode.port (optional);
}
In this example, the cluster node can start if it is alone. And it will be notified when other nodes appear or disappear.
When a component instance is started, and that one of its dependencies disappear, Roboconf stops it and puts it in the starting state. If the dependency comes back, it will automatically be started.
ip is a special variable whose value is set automatically by Roboconf.
Any other exported variable must have a default value.
Graph Files - 4/5
Imports and exports deal with runtime dependencies.
Containment relations are handled through the children key word.
# Tomcat and MySQL are other graph components
VM_Tomcat {
children: Tomcat;
}
VM_MySQL {
children: MySQL;
}
VM_All {
children: Tomcat, MySQL;
}
children lists components that can be deployed over an instance of this component. It can be very constrained or quite flexible.
Graph Files - 5/5
Sometimes, components share properties.
It is possible to group properties into a facet.
# Facets
facet VM {
children: deployable;
installer: target;
}
facet deployable {
installer: puppet;
exports: ip;
}
# Components
VM_EC2 {
facets: VM;
}
VM_Azure {
facets: VM;
}
Tomcat {
facets: deployable;
}
Recipes - 1/3
Recipes are resources used by a Roboconf plug-in to manage the life cycle of component instances.
VM_EC2 {
installer: target;
}
VM_Openstack {
installer: target;
}
This graph implies there will be two directories in the graph, called VM_EC2 and VM_Openstack. Because these components use the target installer, these directories will contain a target.properties file.
One will have parameters to handle VM on EC2.
The other one will contain parameters related to Openstack.
Recipes - 2/3
Here is an example of target.properties.
# These properties are specific to Amazon Web Services
target.id = ec2
ec2.endpoint = eu-west-1.ec2.amazonaws.com
ec2.access.key = YOUR_EC2_ACCESS_KEY
ec2.secret.key = YOUR_EC2_SECRET_KEY
ec2.ami = Your AMI identifier (ami-...)
ec2.instance.type = t1.micro
ec2.ssh.key = Your SSH Key
ec2.security.group = Your Security Group
Recipes - 3/3
The target installer is in charge of managing machines (VM, server, device...). The configuration depends on the target type.
The bash installer manages the life cycle of a component through bash scripts (deploy, start, stop, undeploy and update). These scripts must be idempotent.
The puppet installer manages the life cycle of a component through a Puppet module. The module name must start with roboconf_.
These are the only available extensions for now.
But new ones can be easily created (Chef, ANT, custom one...).
Instances - 1/2
Components define rules and relations (how).
Instances define what really runs (what and where).
Unlike the graph, which was really a graph, instance definitions are trees.
# Deploy on EC2 VM (called VM1)
instance of VM_EC2 {
name: VM1;
instance of MyApp {
name: MyApp_on_EC2;
}
}
# Deploy on Openstack VM (called VM2)
instance of VM_Openstack {
name: VM2;
instance of MyApp {
name: MyApp_on_Openstack;
}
}
Instances - 2/2
Beyond specifying a name and its components, an instance can override the value of exported component properties.
It can even define new properties that were not defined in the component.
This is useless with respect to exports, but it can be very useful in recipes.
# The Component
Tomcat {
exports: ip, port = 8080;
}
# An instance
instance of Tomcat {
name: Tomcat;
port: 8080;
log_level: INFO; # used in the recipe
}
Application Descriptor
The application descriptor is a simple properties file with meta-data about the project itself.
# Application Descriptor for Roboconf
application-name = MyApp
application-qualifier = sample
application-description = A sample application
application-namespace = net.roboconf
application-dsl-id = roboconf-1.0
graph-entry-point = main.graph
instance-entry-point = initial-model.instances
Tools
Tooling
Beyond the way Roboconf is implemented, some choices have been made to make things simple. The syntax of configuration files was chosen in this sense.
However, tools are always helpful.
They help new users, and more generally, they make gain a lot of time.

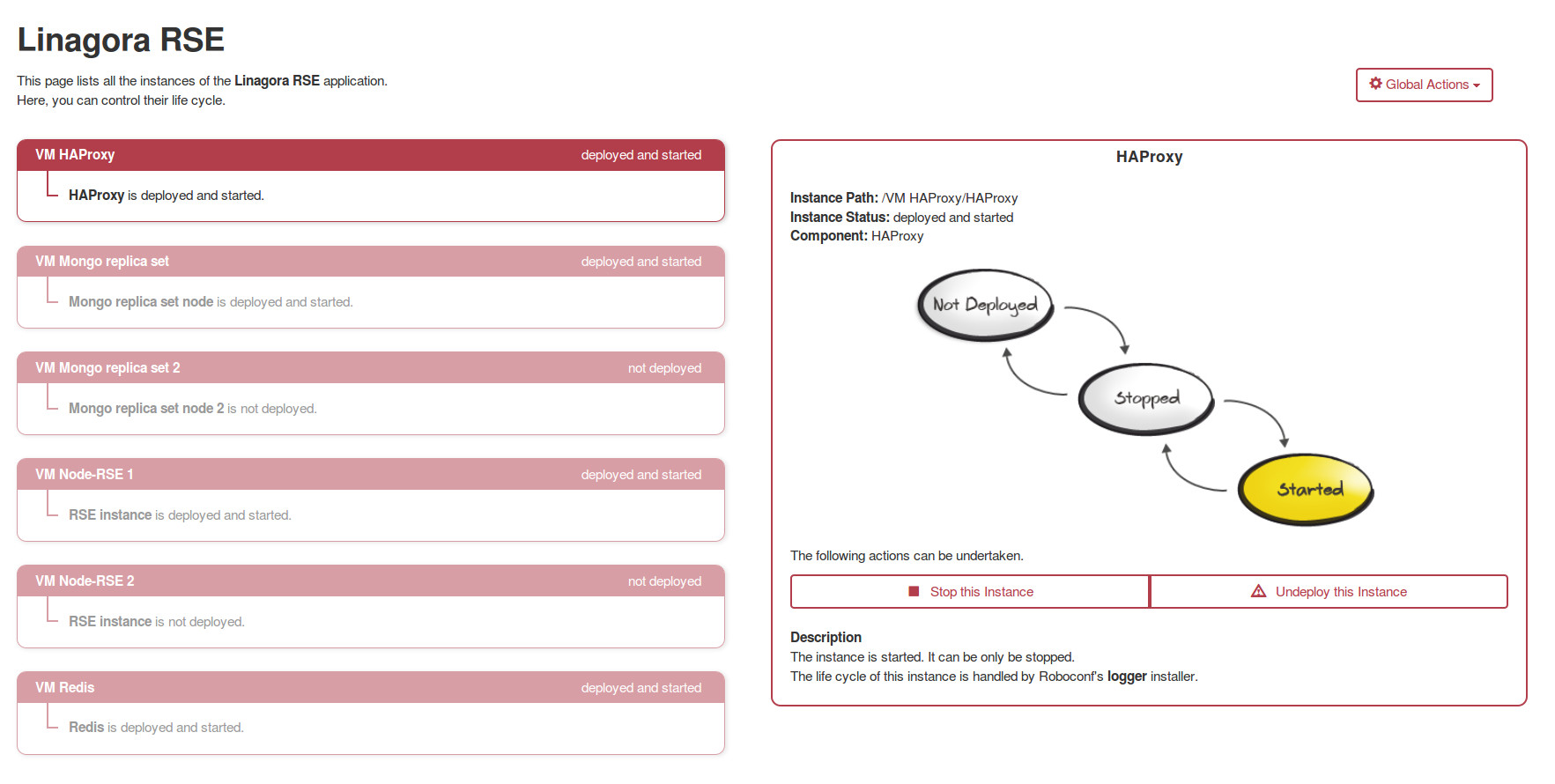
The Web Administration - 1/2
The web administration is web application (AngularJS) that provides a user interface for the DM's REST API.
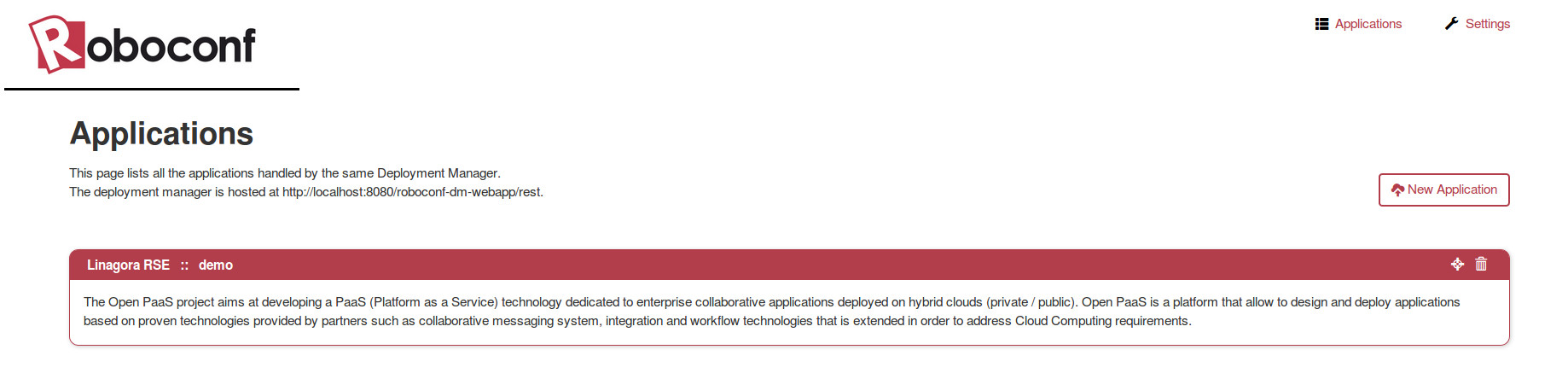
The Web Administration - 2/2
This console helps to perform actions and watch the application parts.
Maven Plug-in
Roboconf has its own Maven plug-in.
It helps to...
- ... validate the configuration files (graph, instances)...
- ... package the project in a deployable archive...
- ... insert Maven properties in configuration files.
Ongoing work will allow testing and sharing reusable recipes.
Other tools will come later.
Eclipse Plug-in
Roboconf has also its own Eclipse plug-in.
It provides a creation wizard for new projects, and dedicated editors.
Resources
Download & Documentation
roboconf.net
Source Code
github.com/roboconf
Contact & Questions
twitter.com/roboconf
github.com/roboconf/roboconf/issues